01 · Transient obstacle
Running animal
"A dog is running across the mowing path from the left." · obstacle: transient · action: STOP
Dual-frame inference correctly treats motion as transient rather than as a fixed obstacle to navigate around.
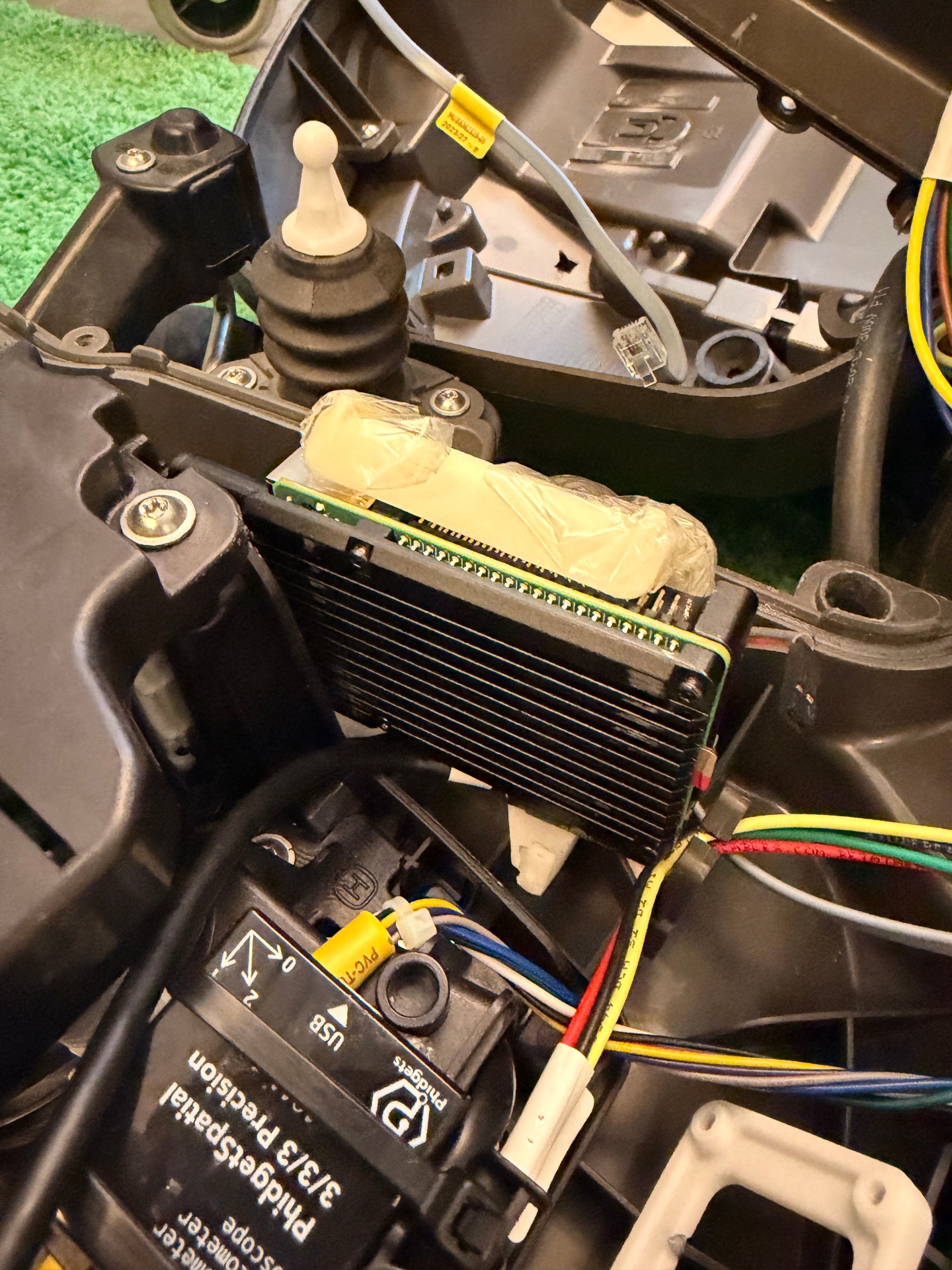
The pipeline was deployed on a real Husqvarna Automower in an outdoor test environment. Onboard compute is intentionally modest; the edge node carries the heavy reasoning over a local link.
Robot
Husqvarna Automower 450X Nera
Production residential mower used as the autonomy platform.
Compute
Raspberry Pi 4
Onboard host running segmentation and orchestration.
Camera
OBSBOT Meet 2
Forward-facing USB camera mounted on the mower deck.
Edge node
MacBook Pro M2 Pro
Local edge workstation hosting the candidate VLMs.

"A dog is running across the mowing path from the left." · obstacle: transient · action: STOP
Dual-frame inference correctly treats motion as transient rather than as a fixed obstacle to navigate around.
"People are sitting on a blanket with food and drinks." · obstacle: activity · action: REROUTE
The VLM recognises the configuration as a group activity, not a list of individual objects, and chooses a respectful detour.
"Ornamental flowers, not grass to be mowed." · obstacle: static · action: REROUTE
Differentiates ornamental from wild vegetation by visual reasoning · without a predefined class list.
"A person is standing in the context zone, not the path." · obstacle: none · action: SLOW
Position relative to the mower path is reasoned about, not just detected.
Dual-frame variant outperforms single-frame on moving-subject scenarios.
Showing two consecutive frames gives the VLM enough cue to distinguish movement from static configuration.
Three prompt variants benchmarked on an 18-image curated test set.
Errors became directly attributable to prompt design choices · a diagnostic capability unavailable in segmentation-only systems.
Matched or beat
the segmentation-only baseline across all tested conditions.
Unlocked
open-vocabulary reasoning that is architecturally out of reach for fixed-vocabulary models.
Improved
diagnosability · failures now attributable to model behaviour or prompt design.